首页 / 算法 / 023_STM32之PID算法
023_STM32之PID算法
内容导读
互联网集市收集整理的这篇技术教程文章主要介绍了023_STM32之PID算法,小编现在分享给大家,供广大互联网技能从业者学习和参考。文章包含499字,纯文字阅读大概需要1分钟。
内容图文

(一)PID控制算法(P:比例 I:积分 D:微分)
(二)首先先说明原理,使用的是数字PID算法,模拟PID算法在计算机这样的系统中是不能够直接使用的,数字PID算法又分为位置式PID控制算法和增量式PID控制算法,那么下面从原理上说明这两种算法
(三)原理分析如图
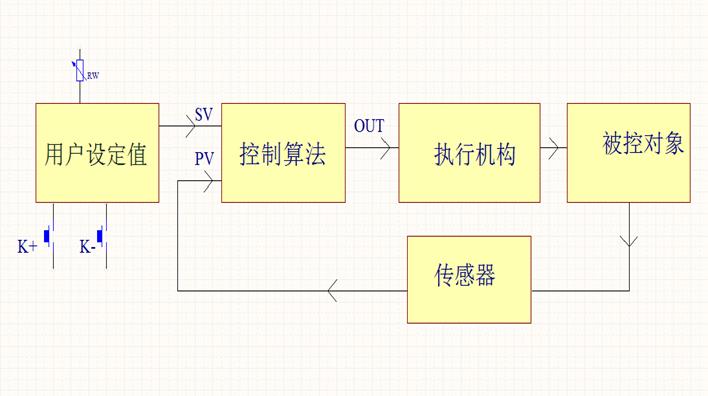
(四)从上面图中我们可以得到定义
定义变量
用户设定值: SV
当前值(实际值): PV
偏差: E = SV - PV
(五)如果我们在一段时间内就从传感器读取一个值,那么我们就可以得到一个实际值的数据序列,,那么我们也会得到一个偏差值的序列
读取时间: t(1) t(2) ------ t(k-1) t(k)
读取到的值: X(1) X(2) ------ X(k-1) X(k)
偏差值: E(1) E(2) ------ E(k-1) E(k)
那么我们从偏差值中可以知道: E(X) > 0 说明未达标
E(X) = 0 说明正好达标
E(X) < 0 说明超标
原文:https://www.cnblogs.com/luxiaoguogege/p/10230369.html
内容总结
以上是互联网集市为您收集整理的023_STM32之PID算法全部内容,希望文章能够帮你解决023_STM32之PID算法所遇到的程序开发问题。 如果觉得互联网集市技术教程内容还不错,欢迎将互联网集市网站推荐给程序员好友。
内容备注
版权声明:本文内容由互联网用户自发贡献,该文观点与技术仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请发送邮件至 gblab@vip.qq.com 举报,一经查实,本站将立刻删除。
内容手机端
扫描二维码推送至手机访问。