【单片机程序设计】如何单定时器配置多路PWM
内容导读
互联网集市收集整理的这篇技术教程文章主要介绍了【单片机程序设计】如何单定时器配置多路PWM,小编现在分享给大家,供广大互联网技能从业者学习和参考。文章包含2629字,纯文字阅读大概需要4分钟。
内容图文

刚开始玩单片机的朋友需要控制如:步进电机,舵机,直流电机都是通过利用delay函数粗糙地调控高低电平,有的些朋友可能想优化程序,不喜欢用delay函数,他就会用到定时器来配置PWM。如果你会用一个定时器配置一路PWM,那如何才能高效率运用一个定时器配置多路PWM呢?本文就介绍鄙人以舵机控制为例,其他同理,如何用一个定时器配置多路PWM的一个小思路。
舵机如何工作:
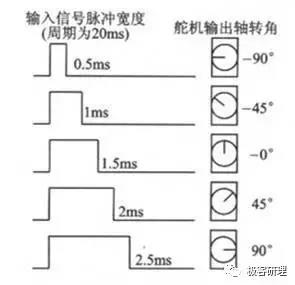
舵机是工作在50hz的脉冲频率,通过控制占空比(0.5-2.5ms)范围来控制舵机转角,脉冲必须以50hz的频率刷新。
比如:一个舵机控制脉冲高电平持续时间0.5ms,低电平持续时间19.5ms,总共20ms(50hz),那么舵机角度为0°如图
控制思路:
1.我们了解了舵机的工作方法,那么我们就可以利用舵机周期性变化来控制PWM,每经过20ms统一对多路脉冲输出总线置低电平(或高电平),这里基本脉冲单位配置函数(定时器配置函数):
void int_timer0() interrupt 1
2.用定时器配置多脉冲,那么我们可以利用定时器配置基本脉冲单位(一个tmp的时间),然后根据不同的脉冲宽度需要,再通过扫描判断的方式,达到想要的脉冲单位个数,就对此脉冲输出端口置高电平(或低电平)。
3.现在我们可以输出自己想要的脉冲了,那么怎么区分不同的输出端口呢?其实,我们只需要在置低电平之前,判断是哪路输出端需要配置低电平就ok了。我们用到舵机控制函数
voidServo(uint angle,uchar No)
输入No为pwm编号(1-8)。
程序实现:
定时器配置函数
void int_timer0() interrupt 1
{
TH0 = (65536-19)/256; //以10UM为基本脉冲控制单位
TL0 = (65536-19)%256;
tmp++; //基本脉冲累buff
}
舵机控制函数(可连续调用,需要不停刷新函数)
这个有点难理解,我们先看一下函数
void Servo(uint angle,ucharNo) //型参为角度和舵机编号1-8
{
code uchar k=0x01;
pwm = k;
pwm = _crol_ (i,(No-1)); //通过输入编号对pwm总线进行位操作
if(tmp <=50+angle+1) //50即0.5ms,后面加常数1用于后期角度调试
{
P1 |=pwm; //配置好的赋予pwm总线
}
else if(tmp <=1980) //1980(20ms)为具体调试值,需要自己调试
{
P1 &=(~pwm);
}
else if(tmp >1980)
{
tmp = 0; //每20ms对基本脉冲单位累计buff清零
}
}
现在进行函数讲解:
假设初始状态为高电平,那么我们一直判断是否达到需要低电平的时间,在达到低电平时间点之前tmp<=50+angle,我们将其置高电平
P1 |=pwm;
那么在20ms内的其他时间elseif(tmp <=1980)就都是低电平了
P1 &=(~pwm);
如果累计超出20ms我们就把tmp清零。
有可能有的朋友会不理解,为什么这条函数可以多次使用,但是多组pwm在示波器上几乎是同时进行变化的?其实这要归功于’<=’这个符号,而不是’=’。每次调用函数,函数其实只是执行了一个有效操作,那就是把某端口置高电平或把某端口置低电平。如果函数voidServo(uint angle,uchar No)执行时间足够快那么就可以在精度满足下把20ms中都抽一点点时间来控制高低电平,就可以重复调用<200次了,也就是一个定时器可以发出<200路pwm。具体还是看晶振和单片机分频啦。怎么样?赶紧试试看吧
内容总结
以上是互联网集市为您收集整理的【单片机程序设计】如何单定时器配置多路PWM全部内容,希望文章能够帮你解决【单片机程序设计】如何单定时器配置多路PWM所遇到的程序开发问题。 如果觉得互联网集市技术教程内容还不错,欢迎将互联网集市网站推荐给程序员好友。
内容备注
版权声明:本文内容由互联网用户自发贡献,该文观点与技术仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请发送邮件至 gblab@vip.qq.com 举报,一经查实,本站将立刻删除。
内容手机端
扫描二维码推送至手机访问。