ubuntu16.04 ROS 之 URDF (一)
内容导读
互联网集市收集整理的这篇技术教程文章主要介绍了ubuntu16.04 ROS 之 URDF (一),小编现在分享给大家,供广大互联网技能从业者学习和参考。文章包含2861字,纯文字阅读大概需要5分钟。
内容图文
")
1. URDF文件简介
1.1 简介
- 全称: Unified Robot Description Format 即:统一机器人描述性格式
1.2 URDF描述规范
- 用一个文件描述一个机器人模型
- 文件的后缀为.urdf
- 文件的内容格式为xml格式
- xml根节点为robot
1.3 各个语句含义
- inertial 定义惯性
- geometry 用来描述模块的形状和大小
- origin 用来描述模块的位置;
- material 并且设置 color 上色
- material 指定颜色rgb和透明度a. 它们取值范围都是[0,1] 区间
2. 建模
2.1 创建简单的机器人模型–四轮小车
- 安装urdf_tutorial包
sudo apt-get install ros-kinetic-urdf-tutorial
- 创建ros工作空间
mkdir myrobot/src -p
cd myrobot/src
catkin_init_workspace
cd ..
catkin_make
- 创建存放小车模型的功能包
cd ~/myrobot/src/
catkin_create_pkg smartcar std_msgs rospy roscpp urdf
cd smartcar
mkdir urdf&launch
cd urdf
gedit myrobot.urdf
- 在myboot.urdf文件里面填入以下代码
<robot name="test_robot">
<link name="base_link">
<visual>
<geometry>
<box size="0.2 .3 .1"/>
</geometry>
<origin rpy="0 0 0" xyz="0 0 0.05"/>
<material name="white">
<color rgba="1 1 1 1"/>
</material>
</visual>
</link>
<link name="wheel_1">
<visual>
<geometry>
<cylinder length="0.05" radius="0.05"/>
</geometry>
<origin rpy="0 1.5 0" xyz="0.1 0.1 0"/>
<material name="black">
<color rgba="0 0 0 1"/>
</material>
</visual>
</link>
<link name="wheel_2">
<visual>
<geometry>
<cylinder length="0.05" radius="0.05"/>
</geometry>
<origin rpy="0 1.5 0" xyz="-0.1 0.1 0"/>
<material name="black"/>
</visual>
</link>
<link name="wheel_3">
<visual>
<geometry>
<cylinder length="0.05" radius="0.05"/>
</geometry>
<origin rpy="0 1.5 0" xyz="0.1 -0.1 0"/>
<material name="black"/>
</visual>
</link>
<link name="wheel_4">
<visual>
<geometry>
<cylinder length="0.05" radius="0.05"/>
</geometry>
<origin rpy="0 1.5 0" xyz="-0.1 -0.1 0"/>
<material name="black"/>
</visual>
</link>
<joint name="joint_base_wheel1" type="fixed">
<parent link="base_link"/>
<child link="wheel_1"/>
</joint>
<joint name="joint_base_wheel2" type="fixed">
<parent link="base_link"/>
<child link="wheel_2"/>
</joint>
<joint name="joint_base_wheel3" type="fixed">
<parent link="base_link"/>
<child link="wheel_3"/>
</joint>
<joint name="joint_base_wheel4" type="fixed">
<parent link="base_link"/>
<child link="wheel_4"/>
</joint>
</robot>
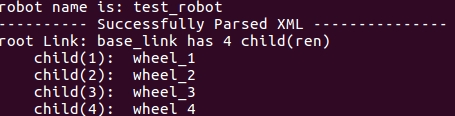
- 在当前目录终端下输入以下命令查看文件是否书写正确
check_urdf 01_skeleton.urdf
- 出现如下页面,说明文件语法没有错误
3. 书写launch 文件
- 在launch文件夹下建立
car01.launch文件,里面输入以下代码
<!-- -->
<launch>
<param name="robot_description"
textfile="$(find little_car)/urdf/car01.urdf"/> // 这一行需要更改为自己urdf文件所在位置
<node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher"/>
<node name="rviz" pkg="rviz" type="rviz" respawn="false" output="screen"/>
</launch>
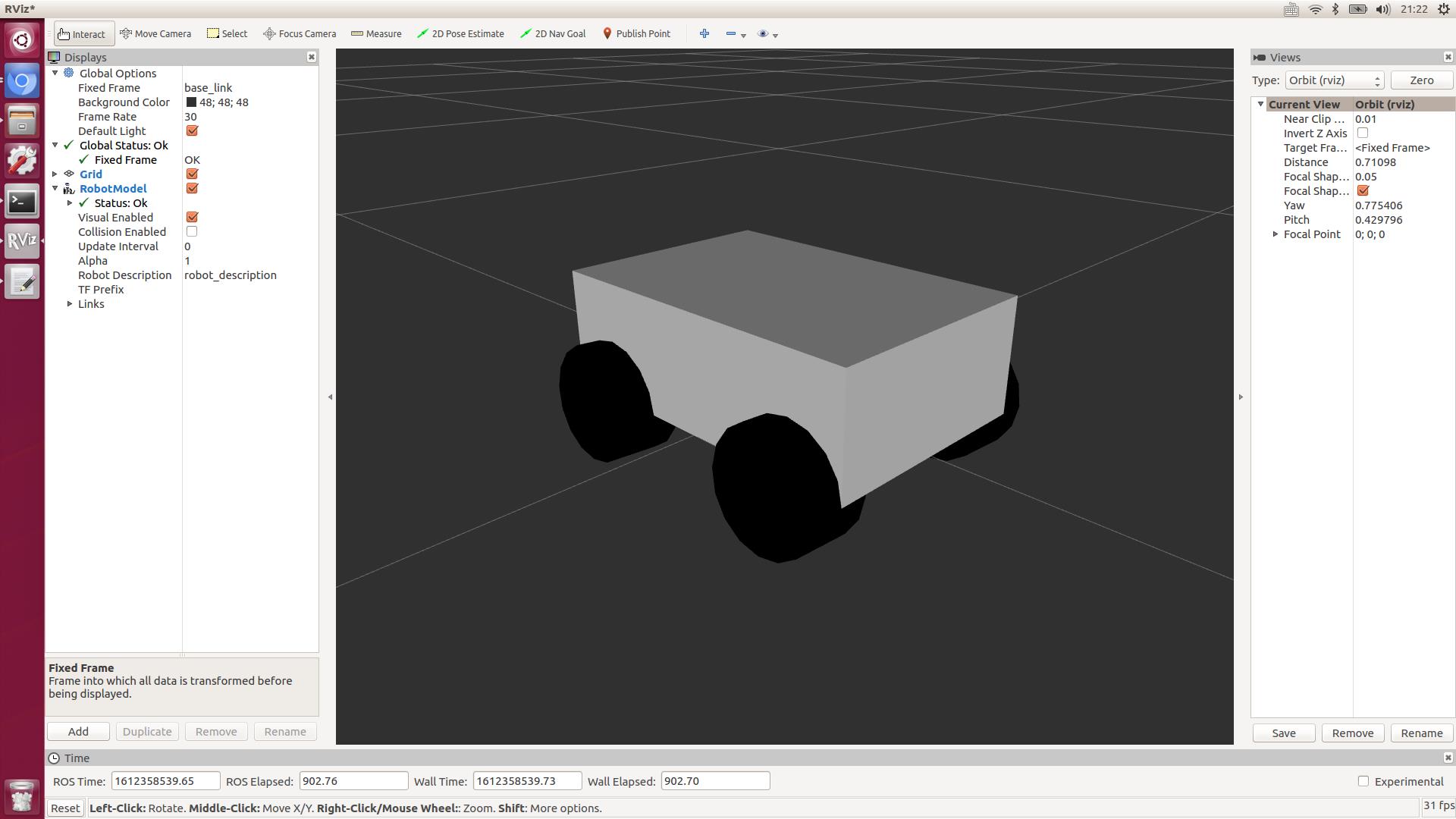
4. 启动launch
roslaunch smartcar car01.launch
4.1 在rviz里面将Fixed Frame 改为: base_link
4.2 点击Add添加 Robotmodel 即可查看自己构建的模型
内容总结
以上是互联网集市为您收集整理的ubuntu16.04 ROS 之 URDF (一)全部内容,希望文章能够帮你解决ubuntu16.04 ROS 之 URDF (一)所遇到的程序开发问题。 如果觉得互联网集市技术教程内容还不错,欢迎将互联网集市网站推荐给程序员好友。
内容备注
版权声明:本文内容由互联网用户自发贡献,该文观点与技术仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请发送邮件至 gblab@vip.qq.com 举报,一经查实,本站将立刻删除。
内容手机端
扫描二维码推送至手机访问。
来源:【匿名】