ubuntu16.04 运行ProSLAM
内容导读
互联网集市收集整理的这篇技术教程文章主要介绍了ubuntu16.04 运行ProSLAM,小编现在分享给大家,供广大互联网技能从业者学习和参考。文章包含2239字,纯文字阅读大概需要4分钟。
内容图文

####仅作为笔记
环境:
Ubuntu 14.04 LTS (gcc 5) + ROS Indigo / OpenCV2 + Qt4 + g2o (see Note for old version)
Ubuntu 16.04 LTS (gcc 5) + ROS Kinetic / OpenCV3 + Qt5 + g2o (current)
Ubuntu 18.04 LTS (gcc 7) + OpenCV3 + Qt5 + g2o (current)
- 依赖
sudo apt-get install build-essential libeigen3-dev libsuitesparse-dev freeglut3-dev libqglviewer-dev libyaml-cpp-dev
sudo apt-get install python-catkin-tools
- OpenCV3.2.0
#依赖
sudo apt-get install build-essential
sudo apt-get install cmake git libgtk2.0-dev pkg-config libavcodec-dev libavformat-dev libswscale-dev
sudo apt-get install python-dev python-numpy libtbb2 libtbb-dev libjpeg-dev libpng-dev libtiff-dev libjasper-dev libdc1394-22-dev # 处理图像所需的包
sudo apt-get install libavcodec-dev libavformat-dev libswscale-dev libv4l-dev liblapacke-dev
sudo apt-get install libxvidcore-dev libx264-dev # 处理视频所需的包
sudo apt-get install libatlas-base-dev gfortran # 优化opencv功能
sudo apt-get install ffmpeg
#安装
https://github.com/opencv/opencv/archive/3.2.0.zip #下载opencv,自行解压
cd opencv-3.2.0
mkdir build && cd build
cmake -D CMAKE_BUILD_TYPE=Release -D CMAKE_INSTALL_PREFIX=/usr/local ../
make -j4 && sudo make install
- Qt5
sudo apt-get install qt5-default
- g2o_catkin
sudo apt-get install ninja-build
mkdir -p ~/catkin_ws/src
catkin_init_workspace
cd .. && catkin_make
sudo gedit ~/.bashrc 加入 source ~/catkin_ws/devel/setup.bash
source ~/.bashrc
cd ~/catkin_ws/src
git clone https://github.com/yorsh87/g2o_catkin.git
catkin build g2o_catkin
- proslam
cd ~/catkin_ws/src
git clone https://gitlab.com/srrg-software/srrg_proslam.git
cd srrg_proslam
./pull_srrg_packages.bash
cd ~/catkin_ws
catkin build srrg_proslam
注意在srrg_proslam的CMakeLists文件内修改以下内容为自己的路径:
-D OpenCV_DIR=/your/path/to/the/opencv/build/folder
-D G2O_ROOT=/your/path/to/the/g2o/root/folder
- 测试
#数据集下载
https://drive.google.com/open?id=0ByaBRAPfmgEqdXhJRmktQ2lsMEE
tar -xzvf 00.tar.gz
#第一个终端
roscore
#另一终端
rosrun srrg_proslam app 00.txt -use-gui
#或者,具体参数参照https://gitlab.com/srrg-software/srrg_proslam:
rosrun srrg_proslam app 00.txt -c configuration_kitti.yaml
rosrun srrg_core srrg_kitti_evaluate_odometry_app -odom trajectory_kitti.txt -gt 00_gt.txt -seq 00.txt
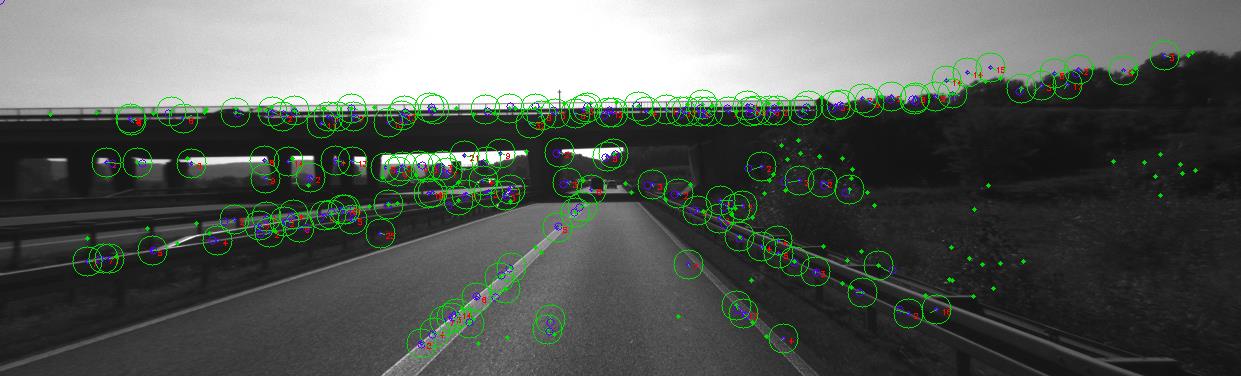
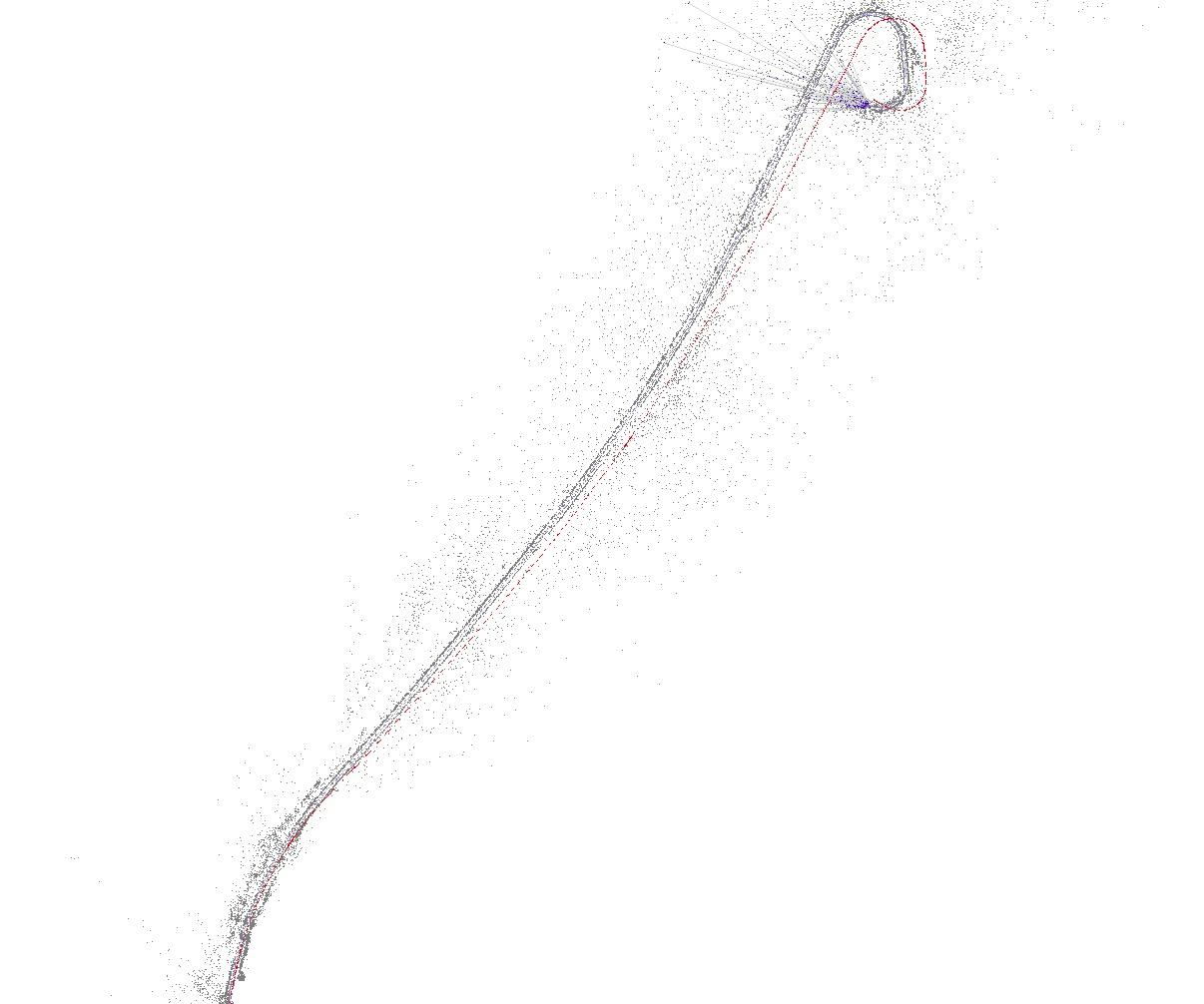
- 测试结果
内容总结
以上是互联网集市为您收集整理的ubuntu16.04 运行ProSLAM全部内容,希望文章能够帮你解决ubuntu16.04 运行ProSLAM所遇到的程序开发问题。 如果觉得互联网集市技术教程内容还不错,欢迎将互联网集市网站推荐给程序员好友。
内容备注
版权声明:本文内容由互联网用户自发贡献,该文观点与技术仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请发送邮件至 gblab@vip.qq.com 举报,一经查实,本站将立刻删除。
内容手机端
扫描二维码推送至手机访问。