Ubuntu16.04安装ROS Kinetic详细过程及错误总结
内容导读
互联网集市收集整理的这篇技术教程文章主要介绍了Ubuntu16.04安装ROS Kinetic详细过程及错误总结,小编现在分享给大家,供广大互联网技能从业者学习和参考。文章包含1897字,纯文字阅读大概需要3分钟。
内容图文

通过自己的亲自安装和网上查找,现将可行方法做如下总结,希望其他人可以少走弯路。
一、配置 Ubuntu 仓库
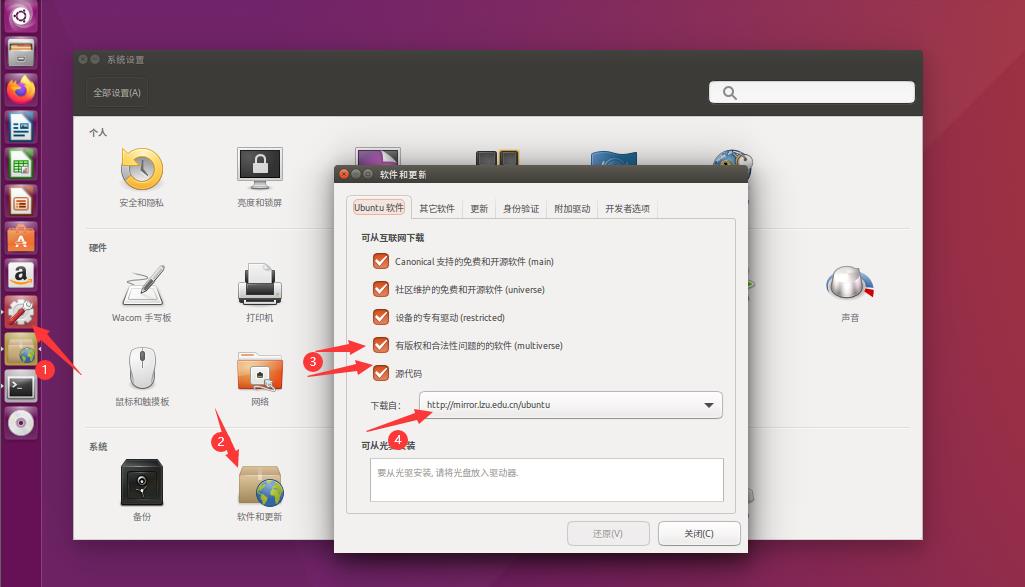 注:第4步中可以选清华,中科大的镜像源等或者选择最佳服务器。
注:第4步中可以选清华,中科大的镜像源等或者选择最佳服务器。
二、设置sources.list
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
三、设置key(公钥已更新)
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
四、更新package
sudo apt-get update
五、安装ROS kinetic完整版
sudo apt-get install ros-kinetic-desktop-full
六、初始化rosdep
sudo rosdep init
rosdep update
七、配置ROS环境
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
八、启动小乌龟(打开终端测试ROS是否安装成功)
roscore
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key
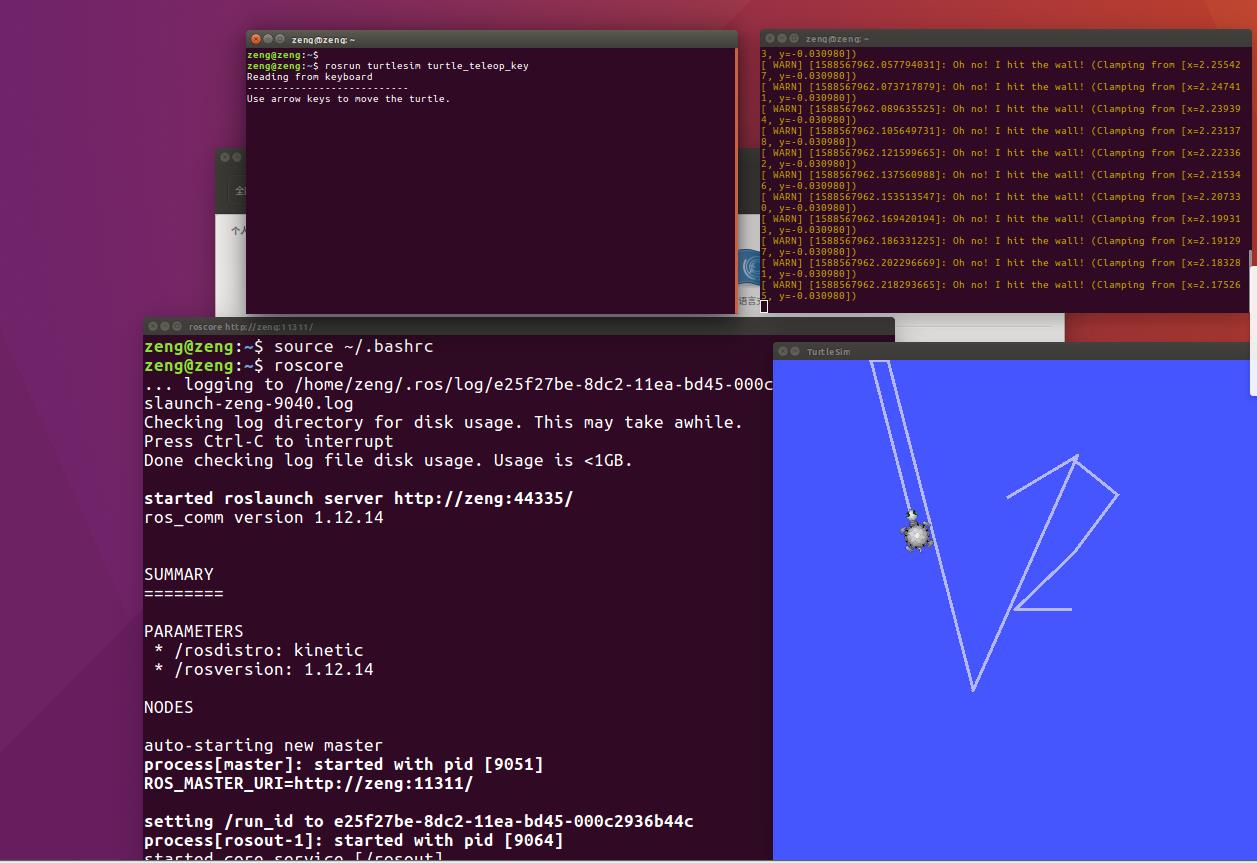
注:这里需要打开三个终端
至此,ROS安装成功!
九、错误总结(一般在初始化rosdep处报错)
1.sudo rosdep init 出现 ERROR: cannot download default sources list from:
如图:
sudo rosdep init
ERROR: cannot download default sources list from:
https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.list
Website may be down.
解决方法:
#打开hosts文件
sudo gedit /etc/hosts
#在文件末尾添加
151.101.84.133 raw.githubusercontent.com
#保持后退出再尝试
当出现如下界面:
只是警告,没有错误,可以用vim打开,则不会报错,然后再重新运行 sudo rosdep init。
若又出现报错:

通常是之前曾经安装过 ROS 系统的某个版本,只需按照提示删除已经存在的初始化文件即可:
sudo rm /etc/ros/rosdep/sources.list.d/20-default.list
再重新运行 sudo rosdep init。
2.rosdep update时出现错误如:unable to process source …或timeout问题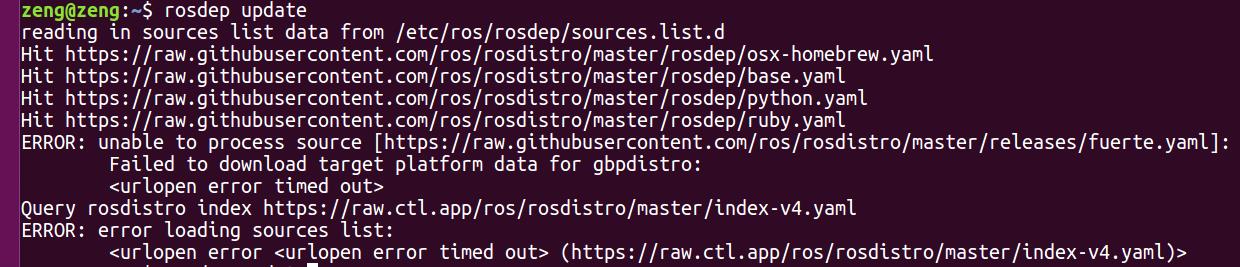
或: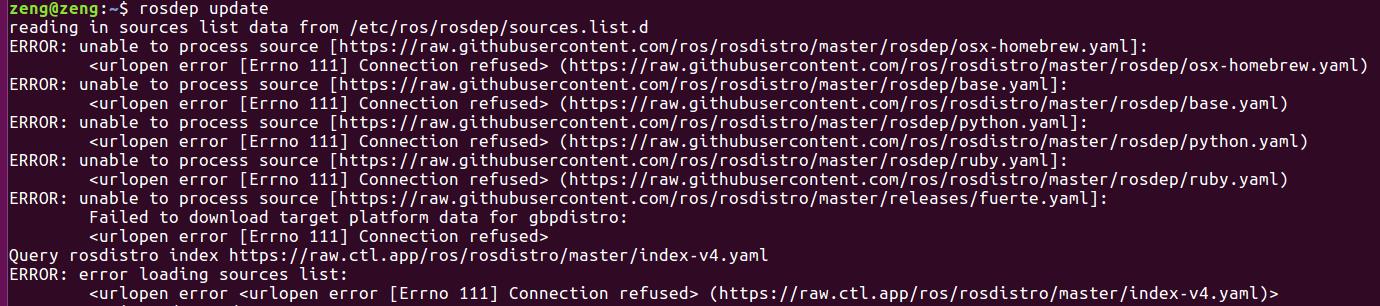
解决方法:
sudo vim /usr/lib/python2.7/dist-packages/rosdep2/gbpdistro_support.py
将其中DOWNLOAD_TIMEOUT = 15.0的值改为50,或60(按i即可编辑,按:wq即可保存退出,未安装vim可自行搜索方法安装)
注:对于rosdep update时出现错误可能是网络原因,可以选择换源或延长请求时间多次尝试。
内容总结
以上是互联网集市为您收集整理的Ubuntu16.04安装ROS Kinetic详细过程及错误总结全部内容,希望文章能够帮你解决Ubuntu16.04安装ROS Kinetic详细过程及错误总结所遇到的程序开发问题。 如果觉得互联网集市技术教程内容还不错,欢迎将互联网集市网站推荐给程序员好友。
内容备注
版权声明:本文内容由互联网用户自发贡献,该文观点与技术仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请发送邮件至 gblab@vip.qq.com 举报,一经查实,本站将立刻删除。
内容手机端
扫描二维码推送至手机访问。