激光相机数据融合(6)--激光相机标定
内容导读
互联网集市收集整理的这篇技术教程文章主要介绍了激光相机数据融合(6)--激光相机标定,小编现在分享给大家,供广大互联网技能从业者学习和参考。文章包含2015字,纯文字阅读大概需要3分钟。
内容图文
--激光相机标定")
如果自己想要搭建一个激光相机系统,那么首要的就是要确定激光与相机的位置关系。那么下面将介绍一些典型的标定方法历史。
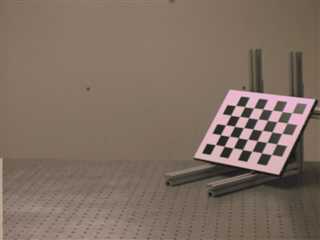
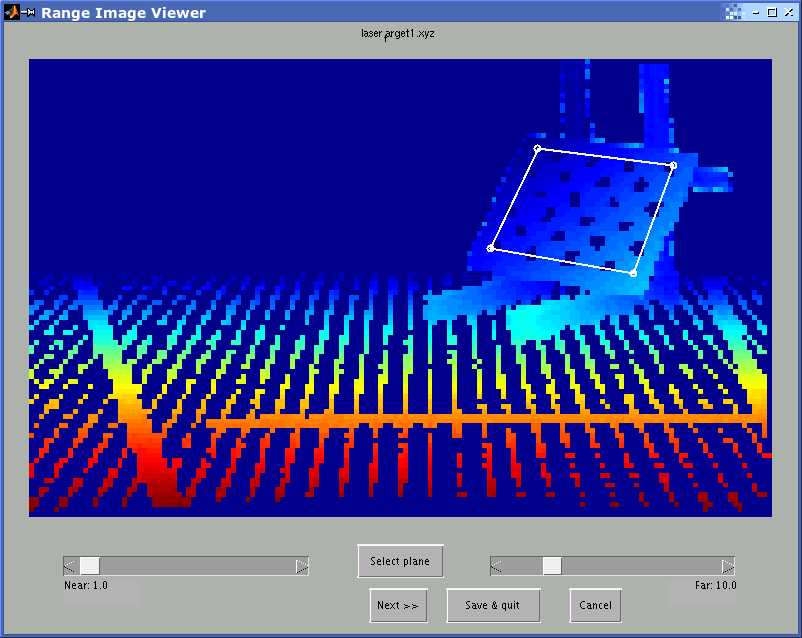
最早的激光相机标定方法,由一些与相机标定类似,只需要一块标定板,网站提供matlab工具包:http://www.cs.cmu.edu/~ranjith/lcct.html. 算法思路很简单,先采集十张左右的数据,分别寻找标定板在相机和激光中的对应平面方程,求解约束方程获取;两传感器位置方程。这些在作者的主页有详细介绍。
KITTI数据集的标定与这个算法类似,文章发表在2012年的ICRA上Automatic Camera and Range Sensor Calibration using a single Shot. 只不过一张图像中出现了多张标定板:
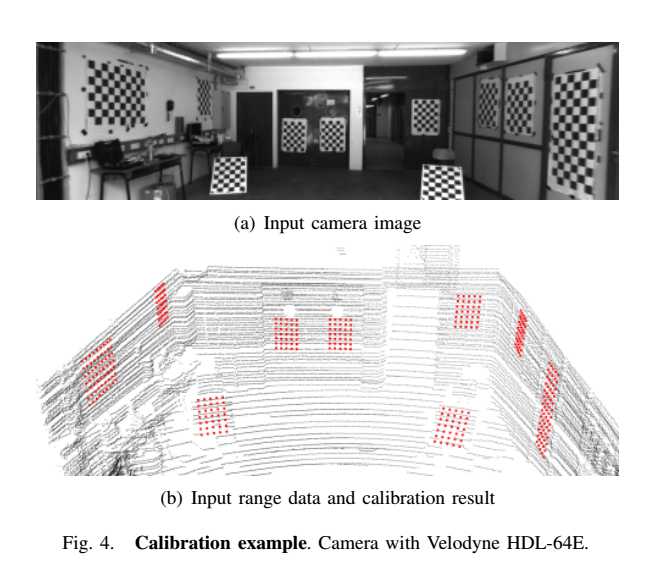
难点在作者如何对应激光中某一张的标定板就是图像上的某一张?作者利用了ransac算法,大致过程就是先假设某三个对应关系是正确的,得出相机与激光的位置关系,然后在反求其他标定板对应关系是否正确。不断循环这一操作,最终找出最优关系。
近几年又出现了,无需标定板,利用激光和图像的互信息标定:http://robots.engin.umich.edu/SoftwareData/ExtrinsicCalib.
不过笔者认为如果想要获取稳定快捷的标定方法,还是最原始的方法好。下面介绍笔者所用设备及其标定方法:

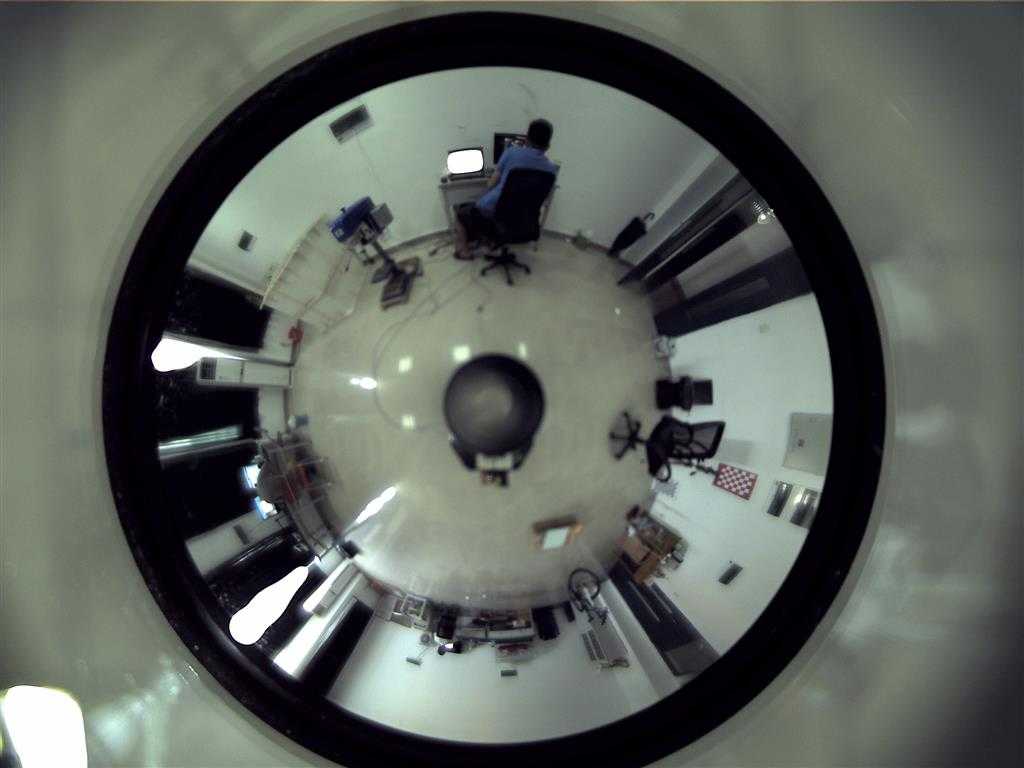
笔者所选用的是一架全景相机配合一个旋转的单线激光,单线激光的配置教程可以参考:https://jvgomez.github.io/pages/hokuyo-dynamixel-coupling-for-3d-mapping.html 其由一个hokuyo 30米激光和一个舵机dynamixel组成。通过舵机旋转,记录下每一时刻的点云来将2D激光转变为3D激光。

首先笔者对全景相机进行了标定:http://www-sop.inria.fr/icare/personnel/Christopher.Mei/ChristopherMeiPhDStudentToolbox.html. 如果是其他相机可以自行寻找标定工具包。
这个工具包都直接给出了相机的投影方程,和每个标定板在相机坐标系下的方程,我们记为:αm,i: θm,iX+dm,i=0.
另一方面利用PCL中的DoN 特征(http://pointclouds.org/documentation/tutorials/don_segmentation.php#don-segmentation)分离出标定板在激光坐标系下的方程:αl,i: θl,iX+dl,i=0.
可以通过最小化如下方程来约束RT矩阵:
$\arg \mathop {\min }\limits_{R,T} \sum\limits_{i = 1}^n {\frac{1}{{l(i)}}} \sum\limits_{j = 1}^{l(i)} {({\theta _{m,i}}(RX_{l,i}^{(j)} + T) + {d_{m,i}})}$
R和T可以分别求解:
${{R_1} = \arg \mathop {\max }\limits_R \sum \theta _{c,i}^T(R{\theta _{l,i}})}$
${{t_1} = \mathop {\arg \min }\limits_t \sum\limits_i {({\alpha _{l,i}}} - ({\alpha _{c,i}} - {\theta _{c,i}}t){)^2}}$
先用USV分解求出近似解:
${R_1} = V{U^T}$
${\theta _l}\theta _c^t = US{V^T}$
再用 Levenberg-Marquardt优化求解。
下面给出标定求解代码:https://github.com/ZouCheng321/6_calibration
更多详请下载我的文章:An automatic calibration between an omni-directional camera and a laser rangender for dynamic scenes reconstruction (http://ieeexplore.ieee.org/document/7866544/)
运行calibration.m 进行标定。
运行colorize.m 进行点云上色。
如果需要看上色后的效果:
cd view
mkdir build
cmake ..
make
./cloud_viewer ../../1.pcd
可以看到图像转为3D场景:

原文:http://www.cnblogs.com/zoucheng/p/7868264.html
内容总结
以上是互联网集市为您收集整理的激光相机数据融合(6)--激光相机标定全部内容,希望文章能够帮你解决激光相机数据融合(6)--激光相机标定所遇到的程序开发问题。 如果觉得互联网集市技术教程内容还不错,欢迎将互联网集市网站推荐给程序员好友。
内容备注
版权声明:本文内容由互联网用户自发贡献,该文观点与技术仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请发送邮件至 gblab@vip.qq.com 举报,一经查实,本站将立刻删除。
内容手机端
扫描二维码推送至手机访问。