路径规划 | 随机采样算法:PRM、RRT、RRT-Connect、RRT*
内容导读
互联网集市收集整理的这篇技术教程文章主要介绍了路径规划 | 随机采样算法:PRM、RRT、RRT-Connect、RRT*,小编现在分享给大家,供广大互联网技能从业者学习和参考。文章包含4107字,纯文字阅读大概需要6分钟。
内容图文

基于图搜索的路径规划算法主要用于低维度空间上的路径规划问题,它在这类问题中往往具有较好的完备性,但是需要对环境进行完整的建模工作,在高维度空间中往往会出现维数灾难。为了解决这些问题,本文将介绍基于随机采样的路径规划算法。这类算法适用于高维度空间,它们以概率完备性(当时间接近无限时一定有解)来代替完备性,从而提高搜索效率。
概率路图算法(Probabilistic Road Map, PRM)
PRM算法首先使用随机采样的方式在环境中建立路径网络图,将连续的空间转换为离散的空间,然后在路径网络图上进行路径规划,解决在高维空间中搜索效率低的问题。
算法流程如下:
-
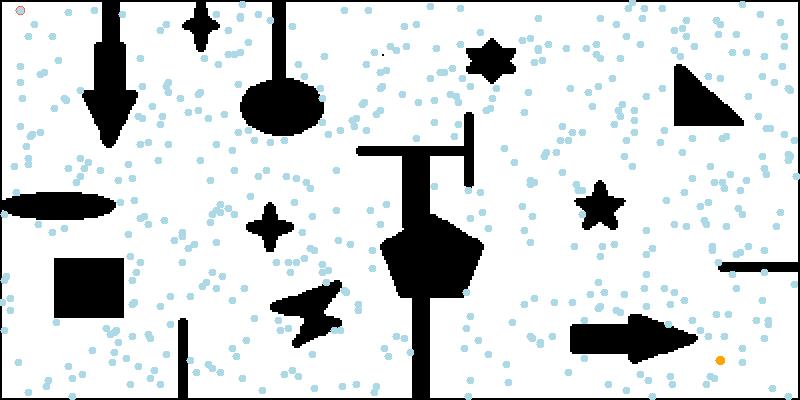
采样:在地图中随机撒点,剔除落在障碍物上的点
-
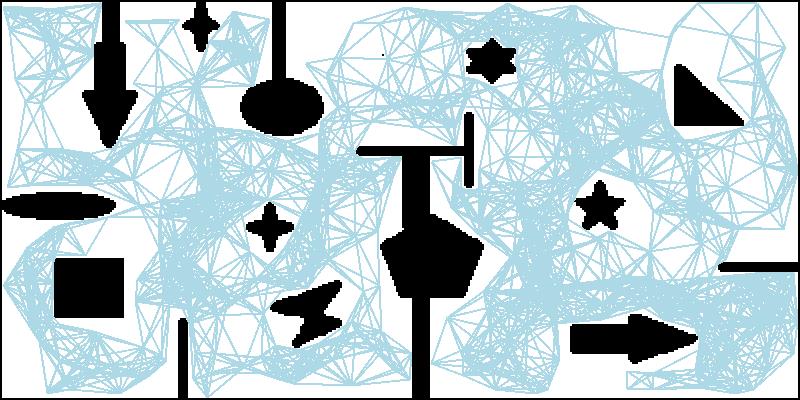
生成概率路图:根据点与点间的距离和是否存在直线通路将上步中得到的采样点进行连接
-
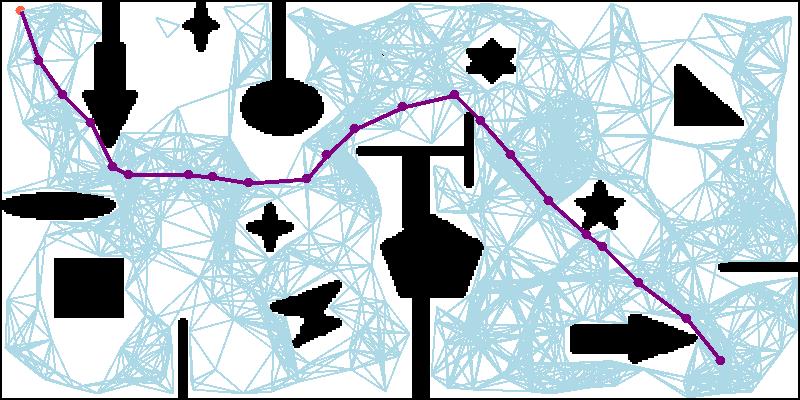
搜索路径:使用图搜索算法(如Dijkstra算法)在上步得到的路图中搜索出一条从起点到终点的最短路径
其中采样点的数量和采样点间存在通路的最大距离是路径规划成功与否的关键。
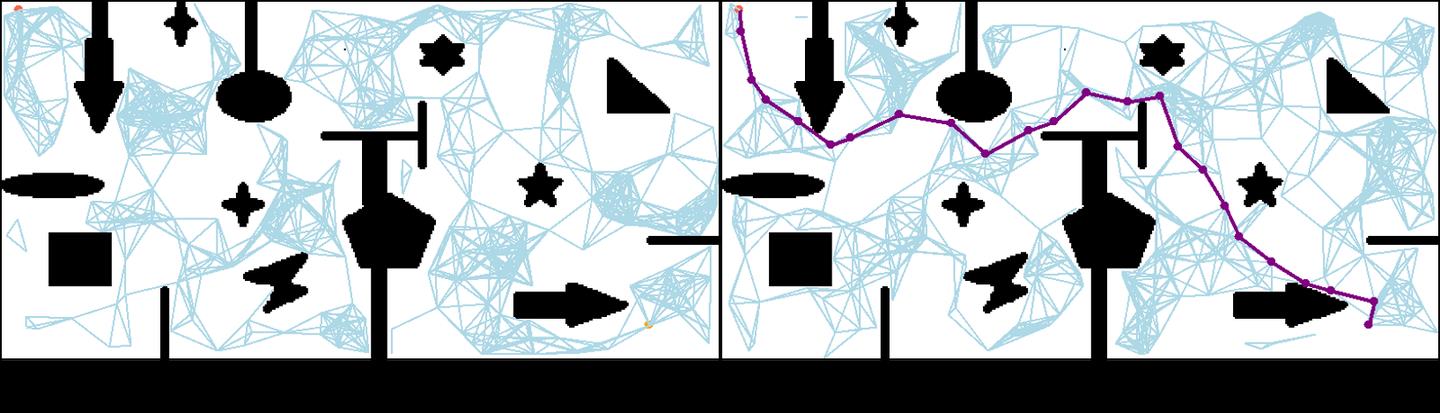
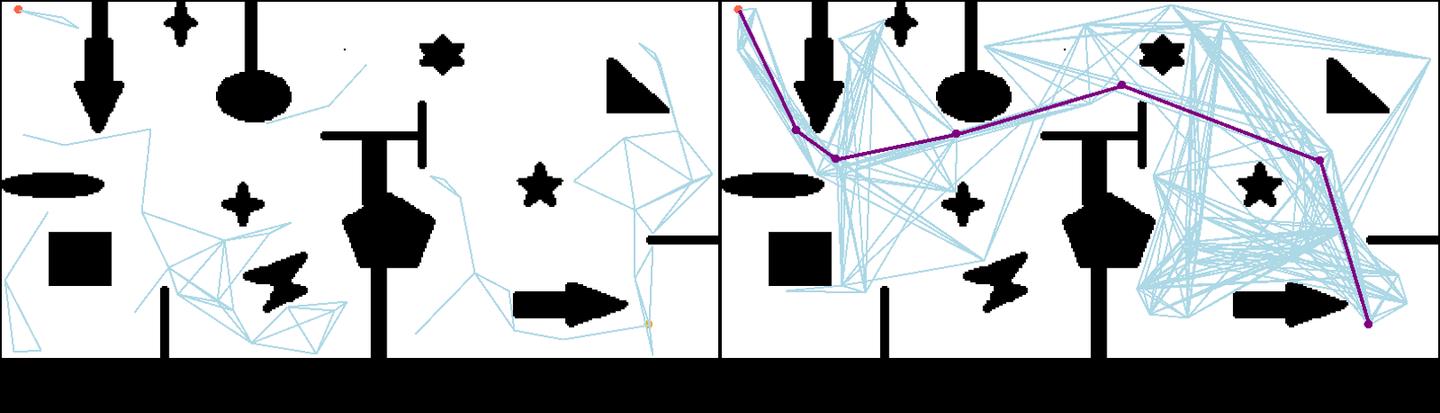
采样点太少,可能会导致路径规划失败,下图(a)中不能生成完整的路图,导致规划失败;而通样是300个采样点,图(b)则能生成一个完整的路图
采样点数量增加,搜索到的路径会逐渐接近最短路径,但同时搜索效率会降低,如下图:
采样点间存在通路的最大距离对规划结果的影响和以上类似:距离太小,会导致规划失败;距离太大,会降低搜索效率。如下图(a),由于设置的最大距离太小,不能生成一张完整的路图,导致规划失败;而图(b)虽然能找到路径,但是生成的路图中存在很多冗余通路。
PRM算法参数少、结构简单,能够提高高维空间搜索效率,也能在生成概率路图时添加机器人的运动学约束,使最终生成的路径符合机器人的运动学模型。同时,随机采样得到的概率路图只需要建立一次就可以一直使用,重用性强。但由于采样过程是完全随机的,得到的节点大多数都偏离最终路径,会增加多余的计算。
快速随机扩展树算法(Rapidly-exploring Random Tree, RRT)
RRT的搜索过程类似于一棵树不断生长、向四周扩散的过程,它以起点作为根节点构建一棵搜索树
T
T
T。
算法流程如下:
-
将起点初始化为搜索树 T T T的根节点 X i n i t X_{init} Xinit?
-
开始循环,直到找到终点或者已经采样得到最大采样点数:
-
在空间中采样得到采样点 X r a n d X_{rand} Xrand?:按照设定的随机采样概率进行随机采样,其余情况直接将目标点作为采样点
-
从搜索树 T T T中取出距离采样点 X r a n d X_{rand} Xrand?最近的节点 X n e a r X_{near} Xnear?。进行判断:
-
将 X n e w X_{new} Xnew?加入搜索树 T T T,它的父节点为 X n e a r X_{near} Xnear?
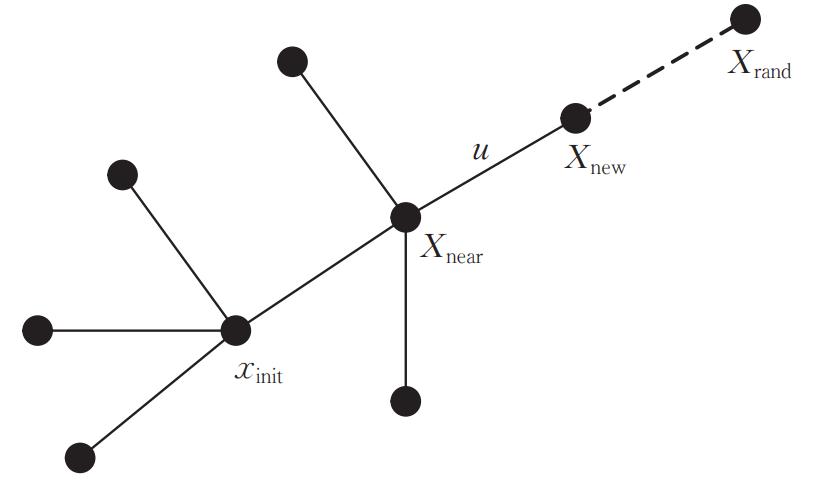
- 如果 X r a n d X_{rand} Xrand?和 X n e a r X_{near} Xnear?间存在直线通路,则根据以下条件初始化一个新节点 X n e w X_{new} Xnew?:如果 X r a n d X_{rand} Xrand?和 X n e a r X_{near} Xnear?间的距离大于步长 u u u,则将 X n e w X_{new} Xnew?初始化为 X n e a r X_{near} Xnear?朝 X r a n d X_{rand} Xrand?方向扩展步长 u u u得到的新节点;否则直接将 X n e a r X_{near} Xnear?初始化为 X r a n d X_{rand} Xrand?
- 如果 X r a n d X_{rand} Xrand?和 X n e a r X_{near} Xnear?间没有直线通路,则直接进入下一轮循环
-
将 X n e w X_{new} Xnew?加入搜索树 T T T,它的父节点为 X n e a r X_{near} Xnear?
节点扩展过程如下图所示
RRT算法以一定的概率直接对目标点进行采样,使搜索树快速朝目标点方向扩展,提高搜索效率。还可以通过优化数据结构的方式提高搜索效率。RRT搜索树有很多存储方式,我们可以使用KD-Tree来减少最近节点
X
n
e
a
r
X_{near}
Xnear?的搜索时间。
RRT-Connect
RRT-Connect分别以起点和目标点为根节点生成两棵树进行双向扩展,当两棵树建立连接时可认为路径规划成功。通过一次采样得到一个采样点,然后两棵搜索树同时向采样点方向进行扩展,加快两棵树建立连接的速度。
算法的运行效果如下图:
RRT*
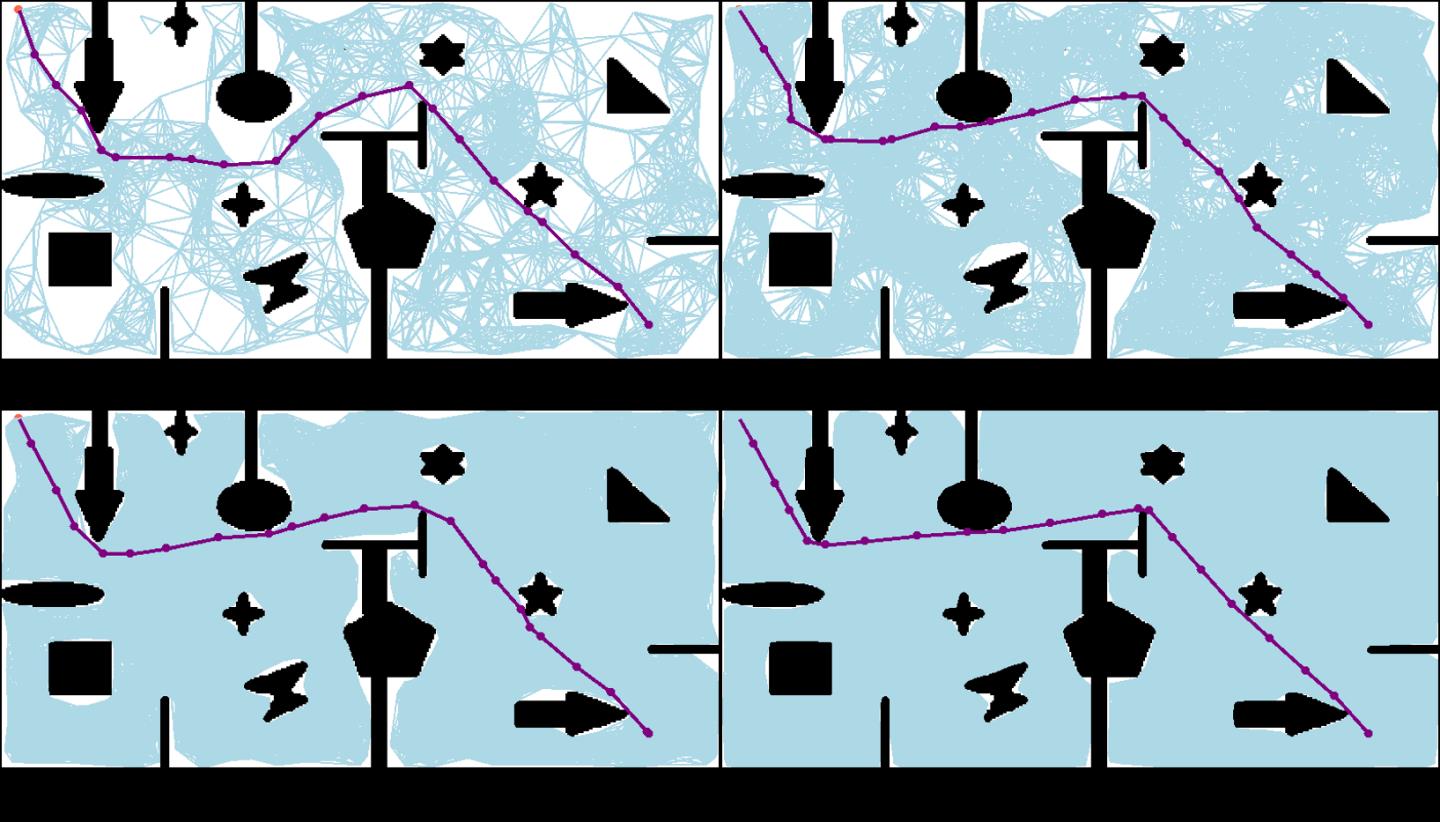
可以看到,RRT算法虽然能快速地找到路径,但是得到的路径并不光滑,对机器人移动而言不是最优路径。所以本节将引入RRT的改进算法——RRT*
RRT*与RRT算法流程基本相同,不同之处就在于最后加入将 X n e w X_{new} Xnew?加入搜索树 T T T时父节点的选择策略。
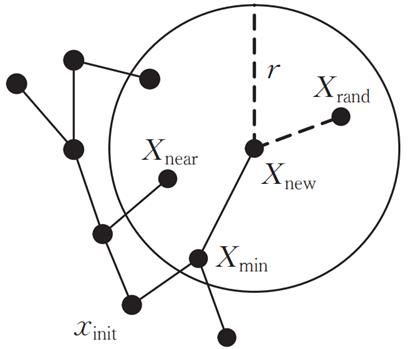
RRT*算法在选择父节点时会有一个**重连(Rewire)**过程,也就是在以
X
n
e
w
X_{new}
Xnew?为圆心、半径为
r
r
r的邻域内,找到与
X
n
e
w
X_{new}
Xnew?连接后代价(从起点移动到
X
n
e
w
X_{new}
Xnew?的路程)最小的节点
X
m
i
n
X_{min}
Xmin?,并选择
X
m
i
n
X_{min}
Xmin?作为
X
n
e
w
X_{new}
Xnew?的父节点,而不是
X
n
e
a
r
X_{near}
Xnear?。重连过程的示意图如下:
加入重连步骤后,可以确保在
X
n
e
w
X_{new}
Xnew?的邻域范围得到的路径是最优的,所以相较于RRT算法得到的路径,RRT*算法得到的路径更为平直,如下图:
RRT*-Connect
与RRT-Connect类似,最大的区别就是将搜索树的构建方式由RRT替换为RRT*
参考
- 运动规划RRT*算法图解
- 陈秋莲, 蒋环宇, 郑以君. 机器人路径规划的快速扩展随机树算法综述[J]. 计算机工程与应用, 2019(16):10-17.
- Klemm S , Oberlnder J , Hermann A , et al. RRT*-Connect: Faster, Asymptotically Optimal Motion Planning[C]// 2015 IEEE International Conference on Robotics and Biomimetics (ROBIO 2015). IEEE, 2015.
内容总结
以上是互联网集市为您收集整理的路径规划 | 随机采样算法:PRM、RRT、RRT-Connect、RRT*全部内容,希望文章能够帮你解决路径规划 | 随机采样算法:PRM、RRT、RRT-Connect、RRT*所遇到的程序开发问题。 如果觉得互联网集市技术教程内容还不错,欢迎将互联网集市网站推荐给程序员好友。
内容备注
版权声明:本文内容由互联网用户自发贡献,该文观点与技术仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请发送邮件至 gblab@vip.qq.com 举报,一经查实,本站将立刻删除。
内容手机端
扫描二维码推送至手机访问。