LSTM前向传播与反向传播算法推导(非常详细)
内容导读
互联网集市收集整理的这篇技术教程文章主要介绍了LSTM前向传播与反向传播算法推导(非常详细) ,小编现在分享给大家,供广大互联网技能从业者学习和参考。文章包含9366字,纯文字阅读大概需要14分钟 。
内容图文
1.长短期记忆网络LSTM
LSTM(Long short-term memory)通过刻意的设计来避免长期依赖问题,是一种特殊的RNN。长时间记住信息实际上是 LSTM 的默认行为,而不是需要努力学习的东西!
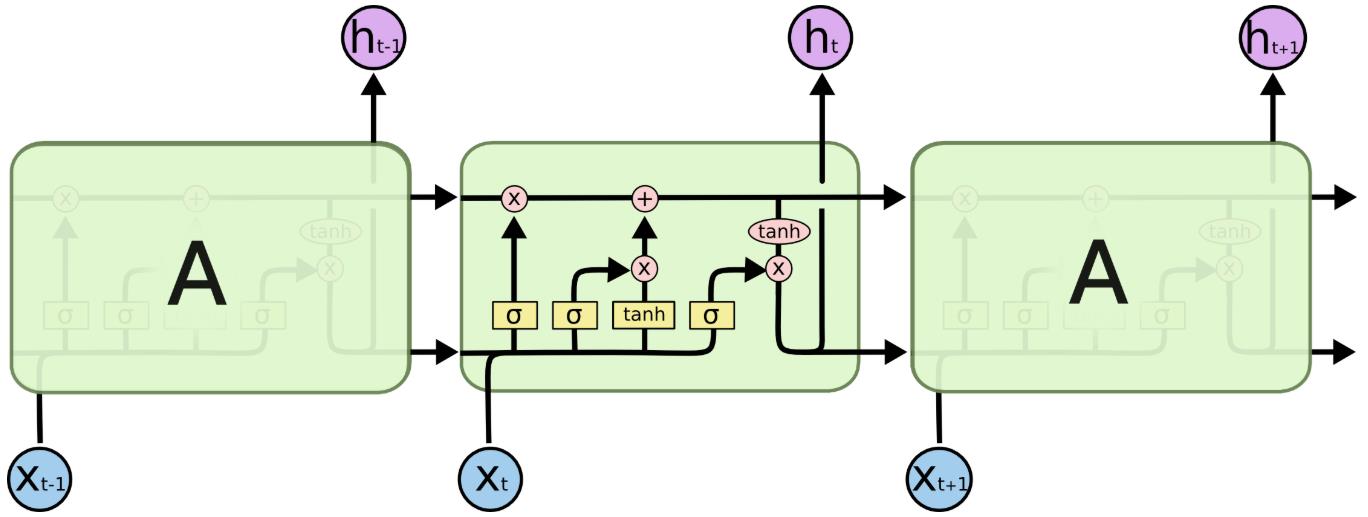
所有递归神经网络都具有神经网络的链式重复模块。在标准的RNN中,这个重复模块具有非常简单的结构,例如只有单个tanh层,如下图所示。
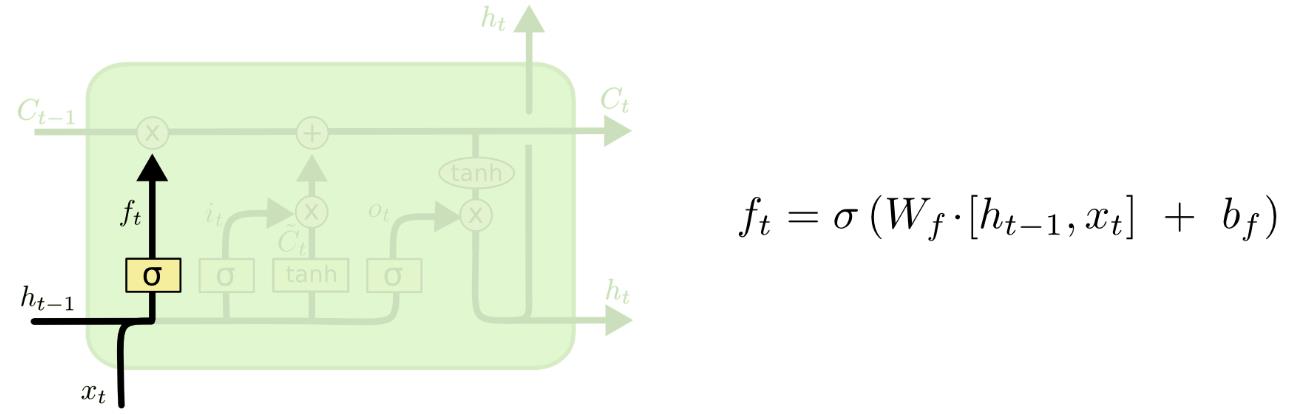
1.1 LSTM–遗忘门
LSTM 的第一步要决定从细胞状态中舍弃哪些信息。这一决定由所谓“遗忘门层”的 S 形网络层做出。它接收 h t ? 1 h_{t-1} x t x_t C t ? 1 C_{t?1}
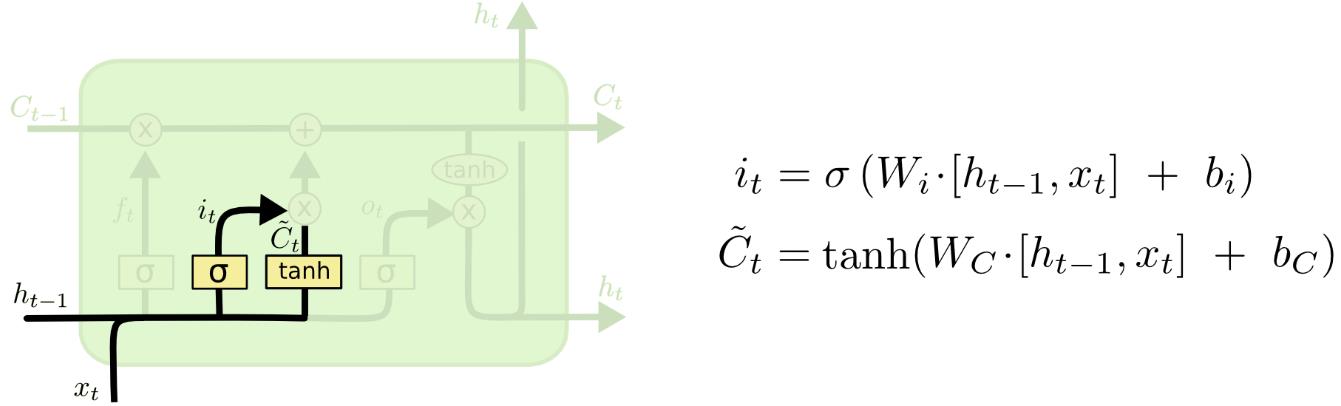
1.2 LSTM–输入门
下一步就是要确定需要在细胞状态中保存哪些新信息。这里分成两部分。第一部分,一个所谓“输入门层”的 S 形网络层确定哪些信息需要更新。第二部分,一个 tanh 形网络层创建一个新的备选值向量—— C ~ t \tilde{C}_t
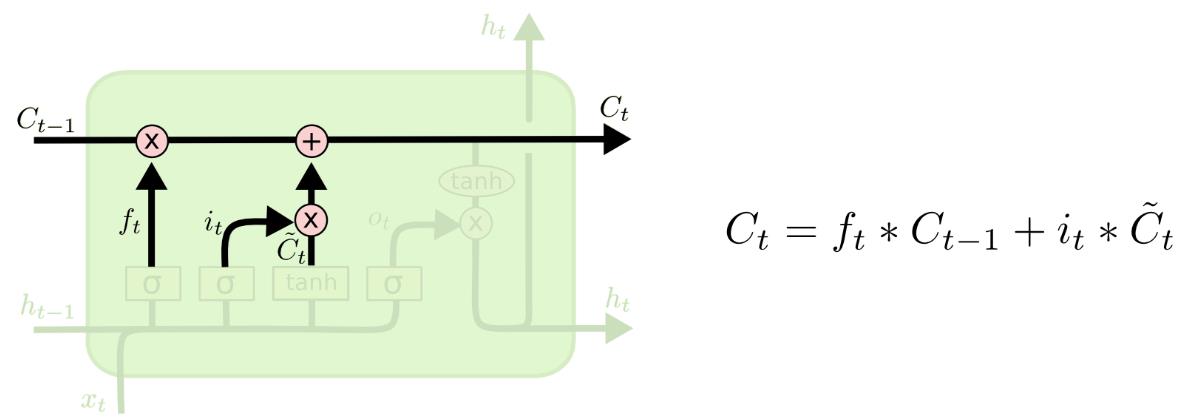
1.3 LSTM–细胞状态更新
现在更新旧的细胞状态 C t ? 1 C_{t?1} C t C_t f t f_t i t ⊙ C ~ t i_t\odot\tilde{C}_t
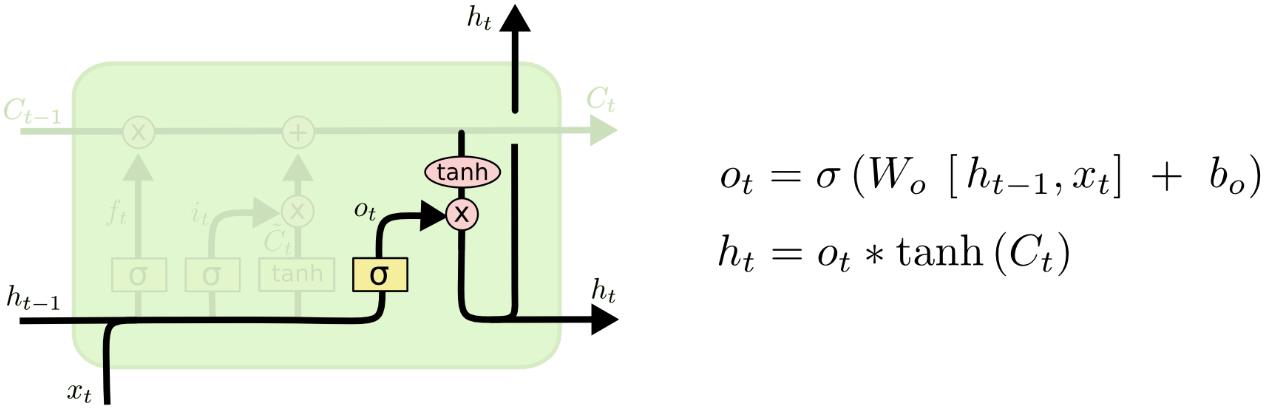
1.4 LSTM–输出门
最后,我们需要确定输出值。输出依赖于我们的细胞状态,但会是一个“过滤的”版本。首先我们运行 S 形网络层,用来确定细胞状态中的哪些部分可以输出。然后,我们把细胞状态输入 tanh(把数值调整到 ?1 和 1 之间)再和 S 形网络层的输出值相乘,部这样我们就可以输出想要输出的分。
1.5 LSTM的变种
目前我所描述的还只是一个相当一般化的 LSTM 网络。但并非所有 LSTM 网络都和之前描述的一样。事实上,几乎所有文章都会改进 LSTM 网络得到一个特定版本。差别是次要的,但有必要认识一下这些变种。
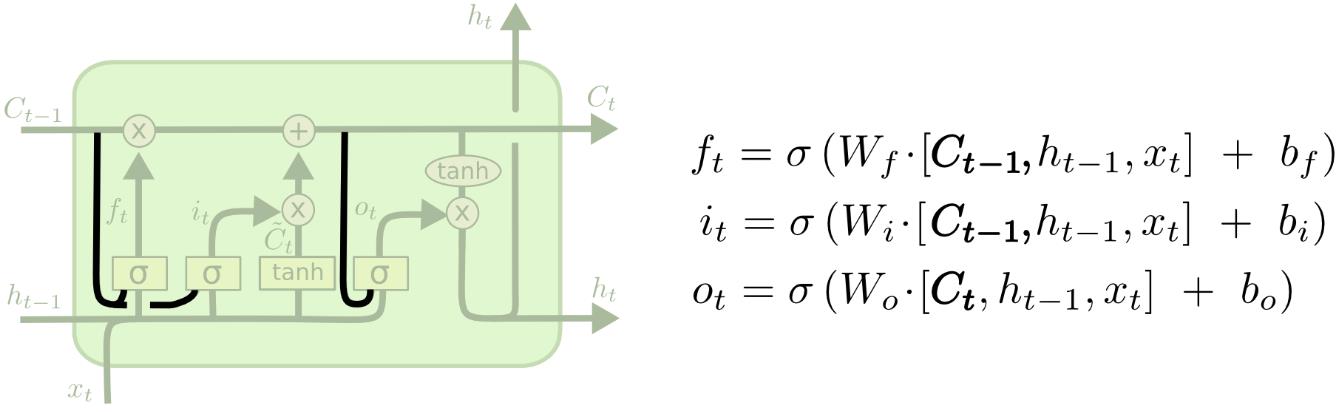
(1) 一个流行的 LSTM 变种由 Gers 和 Schmidhuber 提出,在 LSTM 的基础上添加了一个“窥视孔连接”,这意味着我们可以让门网络层输入细胞状态。
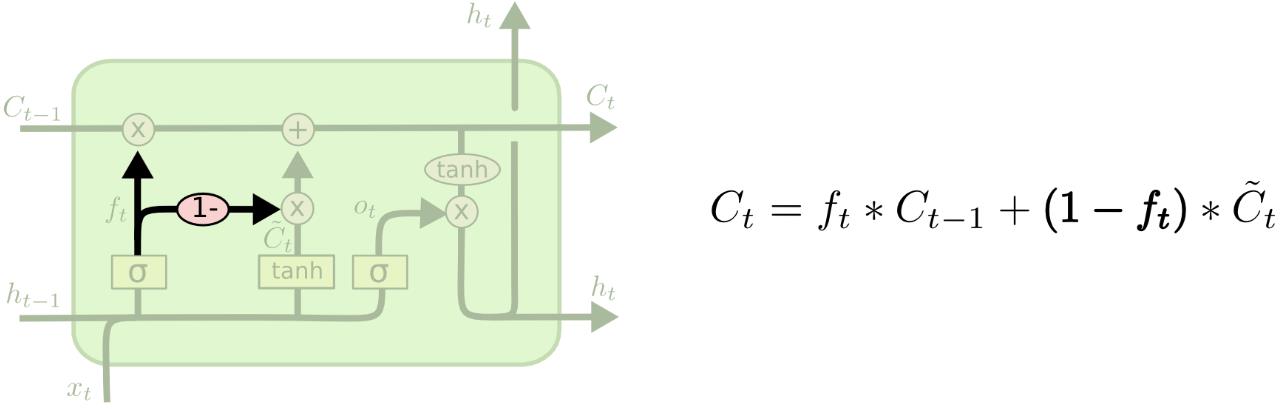
(2)另一个变种把遗忘和输入门结合起来。同时确定要遗忘的信息和要添加的新信息,而不再是分开确定。当输入的时候才会遗忘,当遗忘旧信息的时候才会输入新数据。
2.LSTM前向传播与反向传播
本小节只推导添加“窥视孔连接”的变种LSTM,如下图所示,其它LSTM变种的推导方法与该方法类似,这里不做过多介绍。对反向传播算法了解不够透彻的,请参考https://zhuanlan.zhihu.com/p/79657669 ,这里有详细的推导过程,本文将直接使用https://zhuanlan.zhihu.com/p/79657669 的结论。
为了更直观的推导反向传播算法,将其转化为右图所示形式。
2.1 LSTM前向传播
LSTM在t时刻的前向传播公式为:{ i t = σ ( i ~ t ) = σ ( W x i x t + W h i h t ? 1 + W c i c t ? 1 + b i ) f t = σ ( f ~ t ) = σ ( W x f x t + W h f h t ? 1 + W c f c t ? 1 + b f ) g t = tanh ? ( g ~ t ) = tanh ? ( W x g x t + W h g h t ? 1 + b g ) o t = σ ( o ~ t ) = σ ( W x o x t + W h o h t ? 1 + W c o c t + b o ) c t = c t ? 1 ⊙ f t + g t ⊙ i t m t = tanh ? ( c t ) h t = o t ⊙ m t y t = W y h h t + b y
\left\{
\begin{array}{l}
{i_t=\sigma(\tilde{i}_t)=\sigma(W_{xi}x_t+W_{hi}h_{t-1}+W_{ci}c_{t-1}+b_i)} \\
{f_t=\sigma(\tilde{f}_t)=\sigma(W_{xf}x_t+W_{hf}h_{t-1}+W_{cf}c_{t-1}+b_f) }\\
{g_t=\tanh(\tilde{g}_t)=\tanh(W_{xg}x_t+W_{hg}h_{t-1}+b_g)} \\
{o_t=\sigma(\tilde{o}_t)=\sigma(W_{xo}x_t+W_{ho}h_{t-1}+W_{co}c_{t}+b_o) }\\
{c_t=c_{t-1}\odot f_t+g_t\odot i_t}\\
{m_t=\tanh(c_t)}\\
{h_t=o_t\odot m_t}\\
{y_t=W_{yh}h_t+b_y}
\end{array}\right.
2.2 LSTM反向传播
已知:? J ? y t , ? J ? c t + 1 , ? J ? o ~ t + 1 , , ? J ? f ~ t + 1 , ? J ? i ~ t + 1 , ? J ? g ~ t + 1 \frac{\partial J}{\partial y_t},\frac{\partial J}{\partial c_{t+1}},\frac{\partial J}{\partial \tilde{o}_{t+1}},,\frac{\partial J}{\partial \tilde{f}_{t+1}},\frac{\partial J}{\partial \tilde{i}_{t+1}},\frac{\partial J}{\partial \tilde{g}_{t+1}} ? J ? h t \frac{\partial J}{\partial h_t} h t h_t y t 、 o ~ t + 1 、 f ~ t + 1 、 i ~ t + 1 、 g ~ t + 1 y_t、 \tilde{o}_{t+1}、\tilde{f}_{t+1}、\tilde{i}_{t+1}、\tilde{g}_{t+1} ? J ? y t \frac{\partial J}{\partial y_t} h t h_t ? J ? y t W y h T \frac{\partial J}{\partial y_t}W_{yh}^T h t h_t ? J ? h t = ? J ? y t W y h T + ? J ? o ~ t + 1 W h o T + ? J ? f ~ t + 1 W h f T + ? J ? i ~ t + 1 W h i T + ? J ? g ~ t + 1 W h g T
\frac{\partial J}{\partial h_t}=\frac{\partial J}{\partial y_t}W_{yh}^T+\frac{\partial J}{\partial \tilde{o}_{t+1}}W_{ho}^T+\frac{\partial J}{\partial \tilde{f}_{t+1}}W_{hf}^T+\frac{\partial J}{\partial \tilde{i}_{t+1}}W_{hi}^T+\frac{\partial J}{\partial \tilde{g}_{t+1}}W_{hg}^T
{ ? J ? h t = ? J ? y t W y h T + ? J ? o ~ t + 1 W h o T + ? J ? f ~ t + 1 W h f T + ? J ? i ~ t + 1 W h i T + ? J ? g ~ t + 1 W h g T ? J ? m t = ? J ? h t ⊙ o t ? J ? c t = ? J ? m t d m t d c t + ? J ? c t + 1 ⊙ f t + 1 + ? J ? f ~ t + 1 W c f T + ? J ? i ~ t + 1 W c i T ? J ? g t = ? J ? c t ⊙ i t ? J ? i t = ? J ? c t ⊙ g t ? J ? f t = ? J ? c t ⊙ c t ? 1 ? J ? o t = ? J ? h t ⊙ m t } ? { ? J ? g ~ t = ? J ? g t ( 1 ? g t 2 ) ? J ? i ~ t = ? J ? i t i t ( 1 ? i t ) ? J ? f ~ t = ? J ? f t f t ( 1 ? f t ) ? J ? o ~ t = ? J ? o t i t ( 1 ? o t ) ? J ? x t = ? J ? o ~ t W x o T + ? J ? f ~ t W x f T + ? J ? i ~ t W x i T + ? J ? g ~ t W x g T
\left \{\begin{array}{l}
\frac{\partial J}{\partial h_t}=\frac{\partial J}{\partial y_t}W_{yh}^T+\frac{\partial J}{\partial \tilde{o}_{t+1}}W_{ho}^T+\frac{\partial J}{\partial \tilde{f}_{t+1}}W_{hf}^T+\frac{\partial J}{\partial \tilde{i}_{t+1}}W_{hi}^T+\frac{\partial J}{\partial \tilde{g}_{t+1}}W_{hg}^T \\ \\
\frac{\partial J}{\partial m_t} = \frac{\partial J}{\partial h_t} \odot o_t \\ \\
\frac{\partial J}{\partial c_t} = \frac{\partial J}{\partial m_t}\frac{dm_t}{dc_t}+ \frac{\partial J}{\partial c_{t+1}}\odot f_{t+1} +\frac{\partial J}{\partial \tilde{f}_{t+1}}W_{cf}^T+\frac{\partial J}{\partial \tilde{i}_{t+1}}W_{ci}^T \\ \\
\left. \begin{array}{l}
\frac{\partial J}{\partial g_t} = \frac{\partial J}{\partial c_t}\odot i_t \\
\frac{\partial J}{\partial i_t} = \frac{\partial J}{\partial c_t} \odot g_t \\
\frac{\partial J}{\partial f_t} = \frac{\partial J}{\partial c_t} \odot c_{t-1} \\
\frac{\partial J}{\partial o_t} = \frac{\partial J}{\partial h_t} \odot m_t
\end{array} \right \} \Rightarrow \left\{ \begin{array}{l}
\frac{\partial J}{\partial \tilde{g}_t} = \frac{\partial J}{\partial g_t}(1-g_t^2) \\
\frac{\partial J}{\partial \tilde{i}_t} = \frac{\partial J}{\partial i_t}i_t(1-i_t) \\
\frac{\partial J}{\partial \tilde{f}_t} = \frac{\partial J}{\partial f_t}f_t(1-f_t) \\
\frac{\partial J}{\partial \tilde{o}_t} = \frac{\partial J}{\partial o_t}i_t(1-o_t) \\
\end{array}\right. \\ \\
\frac{\partial J}{\partial x_t} = \frac{\partial J}{\partial \tilde{o}_t}W_{xo}^T+\frac{\partial J}{\partial \tilde{f}_t}W_{xf}^T+ \frac{\partial J}{\partial \tilde{i}_t}W_{xi}^T+\frac{\partial J}{\partial \tilde{g}_t}W_{xg}^T\\
\end{array}\right.
对参数的梯度:{ ? J ? W h o = h t T ? J ? o ~ t + 1 ? J ? W h f = h t T ? J ? f ~ t + 1 ? J ? W h i = h t T ? J ? i ~ t + 1 ? J ? W h g = h t T ? J ? g ~ t + 1 { ? J ? W y h = h t T ? J ? y t ? J ? W c f = c t T ? J ? f ~ t + 1 ? J ? W c i = c t T ? J ? i ~ t + 1 ? J ? W c o = c t T ? J ? o ~ t { ? J ? W x o = x t T ? J ? o ~ t ? J ? W x f = x t T ? J ? f ~ t ? J ? W x i = x t T ? J ? i ~ t ? J ? W x g = x t T ? J ? g ~ t
\left \{\begin{array}{l}
\frac{\partial J}{\partial W_{ho}} = h_t^T\frac{\partial J}{\partial \tilde{o}_{t+1}} \\
\frac{\partial J}{\partial W_{hf}} = h_t^T\frac{\partial J}{\partial \tilde{f}_{t+1}} \\
\frac{\partial J}{\partial W_{hi}} = h_t^T\frac{\partial J}{\partial \tilde{i}_{t+1}} \\
\frac{\partial J}{\partial W_{hg}} = h_t^T\frac{\partial J}{\partial \tilde{g}_{t+1}}
\end{array} \right.
\left \{\begin{array}{l}
\frac{\partial J}{\partial W_{yh}} = h_t^T\frac{\partial J}{\partial y_t} \\
\frac{\partial J}{\partial W_{cf}} = c_t^T\frac{\partial J}{\partial \tilde{f}_{t+1}} \\
\frac{\partial J}{\partial W_{ci}} = c_t^T\frac{\partial J}{\partial \tilde{i}_{t+1}} \\
\frac{\partial J}{\partial W_{co}} = c_t^T\frac{\partial J}{\partial \tilde{o}_{t}}
\end{array} \right.
\left \{\begin{array}{l}
\frac{\partial J}{\partial W_{xo}} = x_t^T\frac{\partial J}{\partial \tilde{o}_{t}} \\
\frac{\partial J}{\partial W_{xf}} = x_t^T\frac{\partial J}{\partial \tilde{f}_{t}} \\
\frac{\partial J}{\partial W_{xi}} = x_t^T\frac{\partial J}{\partial \tilde{i}_{t}} \\
\frac{\partial J}{\partial W_{xg}} = x_t^T\frac{\partial J}{\partial \tilde{g}_{t}} \\
\end{array} \right.
参考资料:https://www.cnblogs.com/xuruilong100/p/8506949.html
内容总结
以上是互联网集市为您收集整理的LSTM前向传播与反向传播算法推导(非常详细) 全部内容,希望文章能够帮你解决LSTM前向传播与反向传播算法推导(非常详细) 所遇到的程序开发问题。
如果觉得互联网集市技术教程内容还不错,欢迎将互联网集市网站推荐给程序员好友。
内容备注
版权声明:本文内容由互联网用户自发贡献,该文观点与技术仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请发送邮件至 gblab@vip.qq.com 举报,一经查实,本站将立刻删除。
内容手机端
来源:【匿名】
")